0 ����
���ݲɼ�ϵͳ��������Ƭ�������ڿ��ƣ����ݴ��������������Բɼ������ݽ������㴦���ȽϷ��������ͨ����������λ��ͨ�ţ�������λ��ǿ������ݴ����������ѺõĿ��ƽ�������ݽ��д�������ʾ�����������Ч�ʡ�����ͨ�������Ӳ�����ӣ������ͨ��Э�飬��Ϊ����λ��֮��ͨ�ŵ���ѡ����ֲ��Linux ����ϵͳ��s3c2440 ������Linux �����²������ڣ������˴��ڲ������Ѷȣ�����ʹ�������о����������ģ��Ӧ�ó��������ڲ����ײ�����Ϻķ�ʱ�䡣
1 Ӳ������
s3c2440 ��������˾�����Ļ���ARM9 �˵Ĵ�����������3.3 V ��ѹ���磻 C8051Fxxx ϵ�е�Ƭ��������CYGNAL ��˾�Ƴ�����8051 ���ݵĸ����ܸ��ٵ�Ƭ��������3.3 V ��ѹ���硣���߹����ѹ��ͬ�����Խ��д��п�ͨ��ʱ����Ҫ���е�ƽת����Ӳ�����Ӳ�����õ�TXD,RXD,GND �������ӷ�ʽ��ע����ý������ӷ�ʽ����TXD��RXD,RXD��TXD.
2 Linux �´���ͨ��
2.1 Linux �´����豸����
s3c2440 ����ֲ��Linux 2.6.32 ����ϵͳ��������s3c2440 �Ĵ�����������ͨ��Linux �ṩ�Ĵ��ڲ����������ļ����������ѶԴ��ڵIJ�����ͬ���ļ������������˴��ڵIJ����Ѷȣ������Ч�ʡ��ڳ������豸���ļ�����ͨ���ļ��������������ģ��ļ���������Linux �ں�����һ���Ǹ�������Linux �豸�ļ�������ڡ�/dev��Ŀ¼�£�����Ҳ�����⣬��/dev �п����ҵ����ڶ�Ӧ���豸�ļ������Ķ�Ӧ�Ĵ���1 ���豸�ļ�·���ǡ�/dev /ttySAC1��.
2.2 Linux �´���ͨ�ų������
����ͨ����Ҫ����һЩ�������粨���ʡ�����λ��ֹͣλ�����������ʽ�ȡ���Щ������������Linux�ṩ��termios �ṹ�У��ýṹ��Linux ϵͳ���ڲ�ѯ�Ͳ��������ն˵�һ�����ӿڣ�������ͷ�ļ�< ter-mios. h > �У�������ʾ��
STruct termios{tcflag_t c_iflag; /* �����־* /tcflag_t c_oflag; /* �����־* /tcflag_t c_cflag /* ���Ʊ�־* /tcflag_t c_lflag /* ���ر�־* /cc_t c_cc[NCCS]; /* ��������* /} ;Linux ����ͨ�Ų���ɷ�Ϊ��������������������ͼ1 ��ʾ��
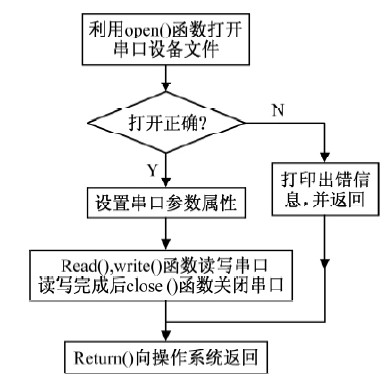
ͼ1
��һ���� ���ڵ���open�� �� ���������豸�ļ�����������- 1,�ɹ����ļ������
#define UART1 /dev /ttySAC1int fd;fd = open�� ��UART1��,O_RDWR�� /* �Կɶ���д��ʽ�����豸* /�ڶ����� ���ô������Ժ���tcsetattr �������ô��ڵĽṹ���ԣ�tcgetatt�� �� ���Եõ����ڵĽṹ���ԡ���termios �ṹ�У��� &=s ?����Ҫ����c_cflag,�û�ͨ��������и�ֵ����ʵ�ִ��ڲ����ʡ�����λ��ֹͣλ����żУ��λ�Ȳ��������á�c_cc �����е���������VMIN ��VTIME �ж��Ƿ����룬c _cc[VTIME]�趨�ֽ�����ʱ���ʱ����c _cc[VMIN]�趨�����ȡ���ܵ���ͽ����ֽ�����������������ֵҪ�趨���������ܱ�֤���ڵ�ͨ�ųɹ��ʡ�
int set_attr�� int fd��{struct termios newtio,oldtio;tcgetattr�� fd,&oldtio�� ;cfsetispeed�� &newtio,B9600�� ; /* ���ö�������Ϊ9600* /cfsetospeed�� &newtio,B9600�� ; /* ����д������Ϊ9600* /memset�� &newtio,0, sizeof�� newtio�� ����newtio. c_cflag = CS8 | CREAD; /* ��������λΪ8 λ����ʹ�ܽ���* /newtio. c_cflag & = ~ PARENB; /* ��������żУ��* /newtio. c_cflag & = ~ CSTOPB; /* 1 λֹͣλ* /newtio. c_cc[VMIN]= 1; /* �����յ�һ���ֽ����ݾͶ�ȡ* /newtio. c_cc[VTIME]= 0; /* ��ʹ�ü�ʱ��* /tcflush�� fd,TCIOFLUSH�� ; /* ˢ���������������* /tcsetattr�� fd,TCSANOW,&newtio�� /* ʹ���õ��ն�����������Ч* /}
�������� ���ڶ�д�����ڹر�������ͨ�Ų����Ϳ����ñ����ļ���д����read�� �� ��write�� �� ���������ˡ�������˳�֮ǰ����close�� �� �����رմ��ڡ�
void rd_wr�� ��{write�� fd,wbuf,10�� ;usleep�� 500000�� ; /* ��ʱ50 ms �ȴ���λ����������* /read�� fd, rbuf,10�� ;printf�� ��read string is %s ��, rbuf�� ;}
3 ͨ�ų������
ARM �뵥Ƭ���Ĵ���ͨ�ų�����������棺 һ��������Ϊ��λ����ARM �Ĵ���ͨ�ų�����һ��������Ϊ��λ���ĵ�Ƭ���Ĵ���ͨ�ų�����ͨ��֮ǰ�����ƶ�������ͨ��Э���Ա�֤ͨ�ŵĿɿ��Ժͳɹ��ʡ���Լ��˫��ͨ��Э�����£�
�� 1�� ������Ϊ9600 bit /s,֡��ʽΪ1 - 8 - N - 1�� 1 λ��ʼλ��8λ����λ������żУ�飬1λֹͣλ�� ;�� 2�� ������λ��ARM ���ٶ�ԶԶ������λ����Ƭ�����ٶȣ����Բ�����λ���������磬��λ���ȴ��ķ�ʽ�������ݴ���ǰARM �ȷ��������ź�/0xaa,��Ƭ���յ���ش�һ��/0xbb,��ʾ���Է��ͣ�����������磻�� 3�� ��Ƭ���˿������жϺͲ�ѯ��ʽ�շ��������ݡ����IJ����жϷ�ʽ���� 4�� ARM ������s3c2440 ����UART1 �͵�Ƭ��ͨ�ţ�UART0 ����Ϊs3c2440 �ն˿���̨��
3.1 ��λ��ARM ��ͨ�ų������
����s3c2440 ��ֲ�˶��ƺͲü����Linux2.6.32�ں˵IJ���ϵͳ���Դ��ڵIJ�������������Linux �´��ڲ�����������������ͼ��ͼ2 ��ʾ��

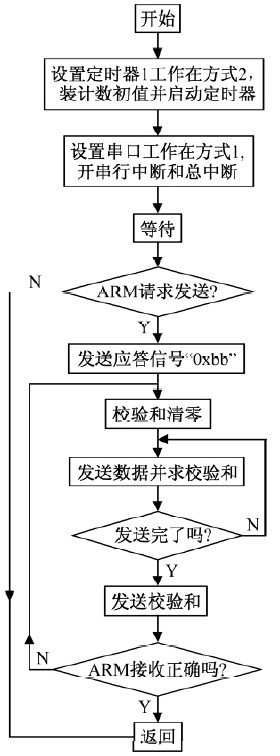
����3.2 ��λ����Ƭ����ͨ�ų������
ѡ��C8051F021 �Ķ�ʱ��T1 ��Ϊ�����ʷ��������������11.0592 MHz,��ʱ�������ڷ�ʽ2,������ֵΪ0xfd,���ڹ����ڴ��з�ʽ1�� 1 - 8 - N - 1�� ,�����жϷ�ʽ�շ����ݡ�
4 ������
���Ž�����Ƕ��ʽLinux �ڹ��ڵ�Ӧ�÷�Χ����׳����ARM ƽ̨��Ƕ��ʽLinux �豸Ҳ����Խ��Խ����������ݲɼ�����Ϊ��λ�������ݽ��д�������ʾ���洢�����͡����������ܷ��������ڴ��������Linux ��ARM �͵�Ƭ���Ĵ���ͨ����ƣ������Աֻ������Լ���ʵ����Ҫ�Ļ������ƶ�ͨ��Э�鼴�ɡ�������Ҫע�����������λ��ARM ���ٶȱȵ�Ƭ����ܶ࣬����һ�β��ܷ���������ݣ������п���ʹ���ͻ�����������������ݶ�ʧ����������ԱҪ����ͨ��˫���豸��״��ѡ����ʵ�֡���ȣ��Դﵽ��ѵĴ���״̬��
��Դ��������
http:www.cps800.com/news/33134.htm


